
A Nemzetközi Űrállomás (ISS) külső részén most zajlik az a kísérlet, amivel a jövőben a műholdak üzemanyag-utántöltését lehetővé tevő technológiát tesztelik.
A NASA Robotic Refueling Mission (RRM) kísérlete január 14-én kezdődött és várhatóan január 24-ig öt napot vesz igénybe. A feladatokat teljes egészében földi távirányítással, az ISS űrhajósainak beavatkozása nélkül hajtják végre. A főszereplő egy műholdat helyettesítő, mosógép méretű „doboz”, amelyet a Goddard Űrközpontban készítettek, és még 2011 nyarán, az utolsó űrrepülőgépes küldetés alkalmával juttattak fel az űrállomásra. (Valójában ez volt a legutolsó rakomány, amelyet valaha egy amerikai űrrepülőgépből az ISS-re helyeztek át az űrhajósok.)
A műveletek során az űrállomás kanadai robotkarját és a Dextre manipulátorkart használják, hogy szimuláljanak egyes, a műholdak utántöltésekor szükséges műveleteket. Ezek között szerepel drótok elvágása, tartályt lezáró sapka lecsavarozása, valamint szimulált üzemanyag-áttöltés. Bár a műholdtankolás ötlete nem új, a kísérletektől azt remélik, hogy közelebb kerülnek a tényleges utántöltés néhány éven belüli megvalósításához.
Újratöltési demonstráció a Nemzetközi Űrállomáson. Az RRM modulról (balra) a speciális „szerszámkészlet” és a Dextre manipulátorkar segítségével lecsavarják a kupakot. (Fantáziakép: NASA)
A Föld körül keringő űreszközök hasznos élettartamát egyrészt a berendezéseik műszaki állapota, másrészt a rendszeres pályamódosító manőverekhez szükséges hajtóanyag korlátozott mennyisége határolja be. Sokszor előfordul, hogy a műhold még működhetne, de kifogy az üzemanyag. Egy új, speciális feladatra szánt műhold megépítése és felbocsátása helyett adott esetben sokkal olcsóbb és gyorsabb lenne, ha mód volna egyszerűen „újratankolni” az űreszközt, meghosszabbítva ezzel hasznos működési idejét. Csak a geostacionárius pályákon mintegy négyszáz adatátjátszó, televíziós műsorszóró vagy időjárási hold teljesít szolgálatot. A helyszíni javítás vagy utántöltés arra is alkalmas lehet, hogy egy útban levő, használhatatlan űreszközt eltávolítsanak a pályáról, ahol veszélyeztetné az utána következő műholdak biztonságos működését.
A mostani kísérletsorozat előzményeként, 2012-ben már sikerrel használták a Dextre manipulátorkart két drót átvágásához, ahol mindössze néhány mm-es volt a megengedett hibahatár. A próbák 2013-ban tovább folynak, az RRM a tervek szerint 2015-ig használatban marad az ISS-en.
A kísérlet bemutatása. (Videó: NASA GSFC)
A pályán történő műholdjavításnak régi hagyományai vannak a NASA-nál. Az első eset az 1980-ban indított Solar Maximum Mission (SMM) napkutató műhold volt, amelyet 1984-ben a Challenger űrrepülőgéppel (STS-41-C) közelítettek meg és fogtak be. Emlékezetes a Hubble-űrtávcső ötszöri nagyjavítása is. Ezeknél a manővereknél azonban űrhajósok helyszíni munkáját is igénybe vették. Igazából ugyanebbe a kategóriába tartoznak az ISS-en űrséták alkalmával végzett építési és javítási munkálatok is. A nagy előrelépés azonban az automata, földi távirányítással működő javítás és üzemanyag-utántöltés volna. Ebbe az irányba tett lépés az RRM kísérlet.
Kapcsolódó cikkek: Kapcsolódó linkek: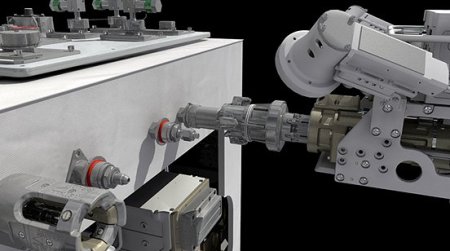
Műholdtankolás a láthatáron?
Javítóműholdak a láthatáron?
STS-135: Zajlik a búcsúrepülés
Automata műhold-utántöltési demonstráció az ISS-en (NASA)
 A menetrend szerinti második teherszállító Dragon űrhajó megérkezett az indítóhely melletti szerelőhangárba. A hordozórakétáját már tavaly odaszállították az Atlanti-óceán partjára.
A menetrend szerinti második teherszállító Dragon űrhajó megérkezett az indítóhely melletti szerelőhangárba. A hordozórakétáját már tavaly odaszállították az Atlanti-óceán partjára. 