Sokoldalú víz alatti robot
(Rovat: Új eszközök és anyagok, Az űrállomás és kontinensünk - 2015.12.09 07:15.)
Az űrhajósok kiképzésére kifejlesztett víz alatti robotot sok más területen is lehet hasznosítani. A lehetőségeket a Földközi-tenger mélyén próbálják ki.
Az űrállomáson sok feladat végrehajtásában robotok segítik az űrhajósokat. Az ember és a robot közötti együttműködést azonban éppúgy be kell gyakorolni a súlytalanságot szimuláló környezetben, mint az űrhajós egyéb feladatait. Enélkül a világűrben még a legegyszerűbb feladat is nehézséget okozhat, például amikor a robot által felé nyújtott szerszámot át akarja venni az űrhajós.
A vízi Eurobot az ESA űrhajóskiképző központjában (EAC). (Kép: ESA / S. Koenen)
Ezért építette meg az Európai Űrügynökség (ESA) az olaszországi Thales Alenia Space közreműködésével az űrhajósok kiképzésére szolgáló medencében használható vízi Eurobot (Eurobot Wet Model) nevű szerkezetet. A háromlábú robotot a robotok manipulátorainak fejlesztésében és a víz alatti alkalmazásokban egyaránt nagy tapasztalatot szerzett, ugyancsak olasz Graal Tech cég készítette. A robot lábai járásra és tárgyak megmarkolására is alkalmasak. Az űrhajóskiképző robot átlagos sűrűségének 1 g/cm3-nek kellett lennie, hogy lebegjen a vízben. Ehhez kívül vastag, belül üreges végtagokra volt szükség, ami viszont körülményessé tette a mozgatásukat. A szakemberek szerint a két követelmény összehangolása volt a fejlesztés legnehezebb feladata.
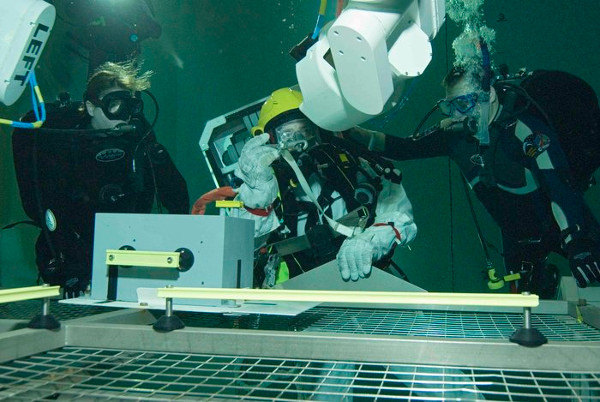
Az Eurobot egyik végtagjával szerszámot nyújt át az űrhajósnak a súlytalanságot szimuláló medencében. (Kép: ESA / Helmut Rub)
Az elkészült vízi Eurobotot eredményesen használták az ESA Köln melletti űrhajóskiképző központjában (EAC, European Astronaut Centre), ahol a súlytalanságot szimuláló medencében (Neutral Buoyancy Facility – „semleges úszási létesítmény”) használják az űrhajósok a súlytalanságban robot közreműködésével végrehajtandó műveletek gyakorlására.
A súlytalanságot szimuláló medence, ahol a víz alatt készülhetnek az űrhajósok az űrben végrehajtandó feladataikra (Európai Űrhajóskiképző Központ, EAC). (Kép: ESA / S. Corvaja)
Jean-François Clervoy francia ESA-űrhajós, miután sikeres víz alatti gyakorlatot hajtott végre az Eurobottal (2007. VII. 9.). (Kép: ESA / S. Koenen)
Az ESA számára a vízi robot fejlesztését már 2006-ra befejezték, azóta a tenger alatti hasznosítással kísérleteznek, az Európai Bizottság anyagi támogatásával. Az első érdemi megbízást a Genovai Egyetemtől kapták, az ottani szakemberek régészeti leletek keresésére és felszínre hozására akarják a robotot használni. A szerkezet ugyanakkor például arra is alkalmas, hogy balesetet szenvedett repülőgépek fekete dobozát megkeresse a tenger mélyén, és azt a felszínre hozza. A vízi Eurobot előnye, hogy elektromos meghajtásának köszönhetően nagyon finom műveleteket is végre tud hajtani, ugyanakkor a szükséges erőkifejtésre is képes. Az olajipari hasznosítás céljára a robot egy- és kétvégtagú változatait is fejlesztik. Az eddigi kísérleteket a Földközi-tengerben 10–30 méteres vízmélységben végezték, utóbbi alkalmazáshoz viszont az Északi-tengeren akár 500 méteres mélységig is működnie kell a robotnak. További alkalmazási lehetőséget jelenthet a cég szerint a tengeralatti bányászat. Mindezeket az új alkalmazási lehetőségeket az eredeti ESA-megbízás tette, illetve teszi lehetővé a cég számára.


| Teljes verzió | Minden jog fenntartva - urvilag.hu 2002-2024 |