Az űrállomás külsejére tapadó robotok?
(Rovat: Új eszközök és anyagok, Az űrállomás és az USA - 2016.03.29 13:15.)
Az alapötletet a gekkók talpának működése adta, az eljárást most a Nemzetközi Űrállomáson is kipróbálják.
A március 23-án indított, 26-án a Nemzeközi Űrállomáshoz (ISS) csatlakoztatott Cygnus teherűrhajó (OA-6) rakományában helyet kapott egyik kísérlet egyik ambiciózus célja, hogy nemsokára az ISS külső falán „mászkáló ” robotokkal végezzenek el egyes javítási, karbantartási feladatokat.
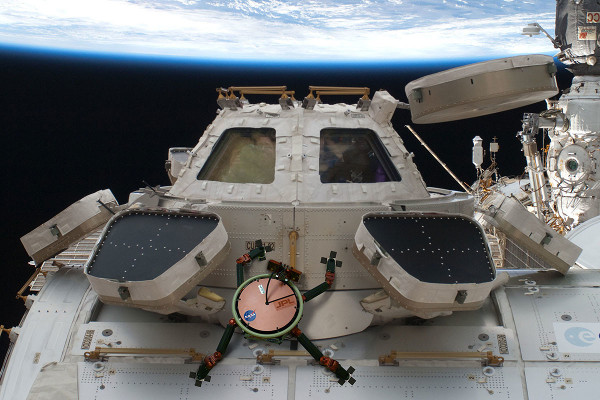
Egyelőre még csak fantáziakép, de néhány éven belül valósággá válhat: egy négylábú robot az ISS külsején, a Cupola modulnál. A tapadást a gekkókéhoz hasonló elven működő talpak biztosítják. (Kép: NASA / JPL-Caltech)
Tavaly év elején mi is beszámoltunk róla, hogy a gekkók és más gyíkfélék lábán levő, akár a függőleges falon való járásukat is lehetővé tevő apró szőrszálak működését lemásolva, parabolarepülések alkalmával súlytalansági kísérleteket végeztek. Az egyik lehetséges alkalmazásként a Föld körüli pályán keringő űrszemétdarabok megközelítése és befogása merült fel. Most a Gecko Gripper eljutott az űrállomásra.
A parabolarepülések alkalmával, mintegy 20 másodperces súlytalansági időszakok alatt már sikeresen vizsgáztak a „lemásolt” gekkólábak, 10 és 100 kg tömegű testek megragadásával. A hamarosan kezdődő kísérletsorozatban az ISS-en az űrhajósok felhelyezik a rendszert az űrállomás falának belsejére, és megfigyelik, hogyan viselkedik sokkal hosszabb (két héttől akár egy éven át terjedő) időn át a súlytalanság körülményei között. Összesen öt különböző méretű eszközt próbálnak ki változatos körülmények között, 30-féle típusú felületen.
Egy igazi, az ISS-en végzendő kísérletben résztvevő Gecko Gripper közelről. (Kép: Aaron Parnes / JPL)

| Teljes verzió | Minden jog fenntartva - urvilag.hu 2002-2024 |